Hallo zusammen,
nachdem ich in diesem Thread vom Problem der spiegelverkehrten Schrift bei einer POV-Stage gelesen hatte, hatte ich doch so einen leichten déjà vu: dieses Problem hatten snaky, carhu und ich im Sommer doch auch zu lösen gehabt") Herausgekommen ist ein Prototyp einer POV-Stage, der relativ unabhängig von der Art der Schüttelbewegung immer lesbare Schrift erzeugt und außerdem ohne Batterien auskommt - aber dazu später . Diese will ich in Absprache mit snaky und carhu hier mal vorstellen.
Herausgekommen ist ein Prototyp einer POV-Stage, der relativ unabhängig von der Art der Schüttelbewegung immer lesbare Schrift erzeugt und außerdem ohne Batterien auskommt - aber dazu später . Diese will ich in Absprache mit snaky und carhu hier mal vorstellen.
Die Lösung für das Problem der spiegelverkehrten Schrift fanden wir bei einer ...
... Schüttellampe! Ihr wisst ja, Schüttellampen funktionieren ohne Batterie: man schüttelt einige Minuten die Lampe und hat dann neben einem Muskelkater in den Armen für wenige Mikrosekunden Licht Technisch ist das folgendermaßen realisiert: in der Lampe ist ein Röhrchen in dem sich ein frei beweglicher Magnet befindet und um welches eine Spule gewickelt ist. Wenn man nun die Lampe schüttelt, bewegt sich der Magnet durch das Röhrchen und damit durch die Spule. Ein sich durch eine Spule bewegendes Magnetfeld: das bedeutet elektr. Spannung - Induktionsgesetz. Immer wenn sich der Magnet in die Spule hinein- oder herausbewegt, wird für einen kurzen Moment eine Spannung in der Spule induziert - siehe Oszillogramm.

Oszillogramm: Spannung in einer Spule
Der von der induzierten Spannung getriebene Strom wird über eine Gleichrichterbrücke geführt und speist einen Kondensator. Letzterer dient dann als Stromquelle für die Lampe. Soweit so gut. Was hat das jetzt mit einer POV-Stage zu tun? Ganz einfach: wenn man es erreicht, dass sich die induzierte Spannung unterscheidet, je nachdem ob die Stage nach links oder rechts bewegt wird, hätte man einen Sensor für die Bewegungsrichtung. Nur leider ist das nicht so einfach. Die Bewegungsrichtung des Magneten ändert sich zwar abhängig davon, ob nach links oder rechts geschwenkt wird, aber gleichzeitig ändert sich auch die Ausrichtung des Magneten: einmal bewegt er sich halt mit den Nordpol zuerst durch die Spule und einmal mit dem Südpol - so ist die induzierte Spannung leider immer gleich: im Fall des Oszillogramms: beim Hineinbewegen des Magneten ein negativer Spannungsimpuls, beim herausbewegen ein positiver.
Lösung: man nimmt zwei Spulen! In diesem Fall ist die Reihenfolge, in der sich der Magnet durch die Spulen bewegt, abhängig von der Bewegungsrichtung der POV-Stage. Wenn man nun an beiden Spulen die Spannung abgreift, kann man daraus die Bewegungsrichtung ableiten.
Im folgenden Bild ist die Schaltung dargestellt, mit der das realisiert werden kann. Die beiden Spulen L1 und L2 sind die "Sensorspulen" durch die der Magnet läuft. Die hier induzierte Spannung wird über die Dioden D1 bis D8 gleichgerichtet und speist den Kondensator C1, der die Stromversorgung der Schaltung übernimmt. Jeweils eines der beiden Spulenenden ist mit einem Eingang des ATtiny 2313 verbunden, so dass dieser über Pinchange (PC)-Interrupts (IRQ) erkennen kann, in welcher Reihenfolge die beiden Spulen durchlaufen wurden (diese Eingänge nenne ich im Folgenden Sensoreingänge). Die Widerstände R1 und R2 halten die Sensoreingänge auf einem definierten Pegel.

Schaltplan POV-Stage
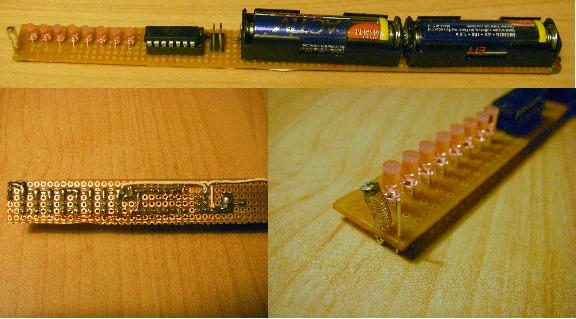
An den Tiny sind dann noch die LEDs für die POV angeschlossen, wobei hier helle LEDs genutzt werden, der Strom durch sie aber mit relativ großen Widerständen (RN1 und RN2) auf unter 1mA begrenzt wird - so reicht der geringe induzierte Strom aus, um die Schaltung zu versorgen. Die Stage nutzt 2x 7 LEDs, so dass zwei Zeilen gleichzeitig dargestellt werden können.
Einen unschönen Punkt an dieser Schaltung muss ich aber auch noch erwähnen: über die Dioden D1 bis D8 fallen ungefähr 0,7V ab. Dadurch ist kurzzeitig (während eines Impulses) die Spannung an den Sensoreingängen 0,7V höher als die Versorgungsspannung bzw. 0,7V niedriger als GND. Beides ist dem Tiny nicht wirklich zuträglich, der hier eigentlich nur -0,5V ... Vcc+0,5V sehen möchte. Bisher ist er mir aber noch nicht abgeraucht


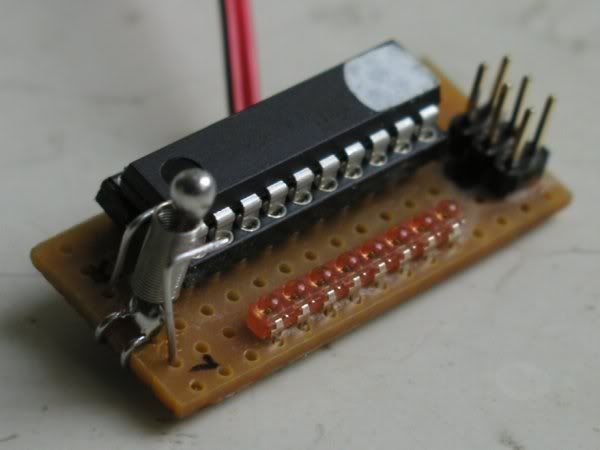
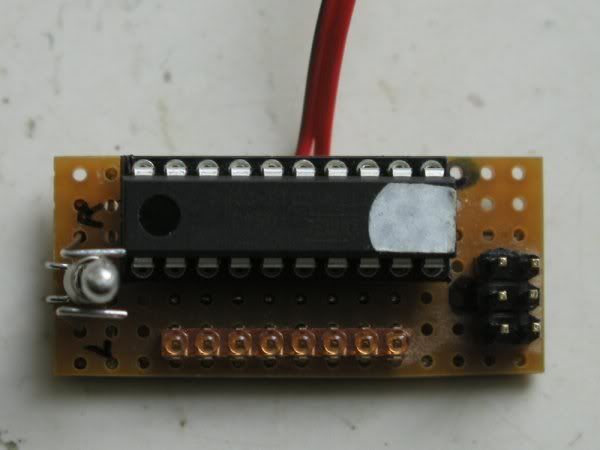
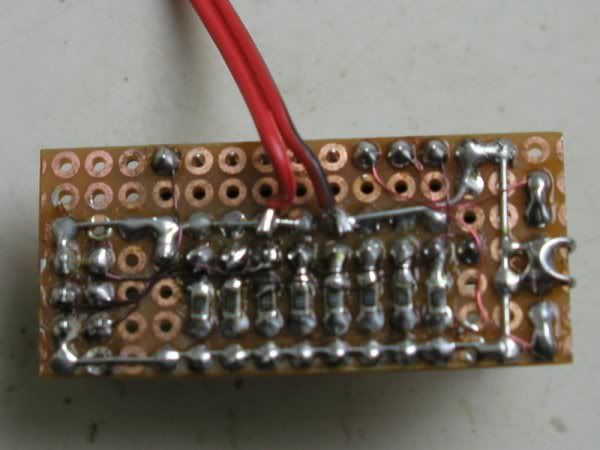
Prototyp
Obiges Bild zeigt den Aufbau des Prototypen auf einer Lochrasterplatine. Abgesehen vom unordentlichen Löten (ursprünglich hatte ich die Schaltung etwas anders aufgebaut und dann alles umändern müssen - daher die Lötzinnreste) ist vielleicht der Sensor noch eine Erwähnung wert: das Röhrchen ist ein Stück Installationsrohr aus dem Baumarkt, auf welches ich zwei Spulen á 1000 Windungen aufgebracht habe. Das Ganze dann noch mit Heißkleber fixiert und auf beiden Seiten mit einem Korkstopfen verschlossen und fertig ist der Bewegungssensor.
Soweit zur Hardware, im nächsten Posting kommt das Programm ...
Viele Grüße,
Thomas(_st)
nachdem ich in diesem Thread vom Problem der spiegelverkehrten Schrift bei einer POV-Stage gelesen hatte, hatte ich doch so einen leichten déjà vu: dieses Problem hatten snaky, carhu und ich im Sommer doch auch zu lösen gehabt
Herausgekommen ist ein Prototyp einer POV-Stage, der relativ unabhängig von der Art der Schüttelbewegung immer lesbare Schrift erzeugt und außerdem ohne Batterien auskommt - aber dazu später . Diese will ich in Absprache mit snaky und carhu hier mal vorstellen.Die Lösung für das Problem der spiegelverkehrten Schrift fanden wir bei einer ...
... Schüttellampe! Ihr wisst ja, Schüttellampen funktionieren ohne Batterie: man schüttelt einige Minuten die Lampe und hat dann neben einem Muskelkater in den Armen für wenige Mikrosekunden Licht
Technisch ist das folgendermaßen realisiert: in der Lampe ist ein Röhrchen in dem sich ein frei beweglicher Magnet befindet und um welches eine Spule gewickelt ist. Wenn man nun die Lampe schüttelt, bewegt sich der Magnet durch das Röhrchen und damit durch die Spule. Ein sich durch eine Spule bewegendes Magnetfeld: das bedeutet elektr. Spannung - Induktionsgesetz. Immer wenn sich der Magnet in die Spule hinein- oder herausbewegt, wird für einen kurzen Moment eine Spannung in der Spule induziert - siehe Oszillogramm.
Oszillogramm: Spannung in einer Spule
Der von der induzierten Spannung getriebene Strom wird über eine Gleichrichterbrücke geführt und speist einen Kondensator. Letzterer dient dann als Stromquelle für die Lampe. Soweit so gut. Was hat das jetzt mit einer POV-Stage zu tun? Ganz einfach: wenn man es erreicht, dass sich die induzierte Spannung unterscheidet, je nachdem ob die Stage nach links oder rechts bewegt wird, hätte man einen Sensor für die Bewegungsrichtung. Nur leider ist das nicht so einfach. Die Bewegungsrichtung des Magneten ändert sich zwar abhängig davon, ob nach links oder rechts geschwenkt wird, aber gleichzeitig ändert sich auch die Ausrichtung des Magneten: einmal bewegt er sich halt mit den Nordpol zuerst durch die Spule und einmal mit dem Südpol
- so ist die induzierte Spannung leider immer gleich: im Fall des Oszillogramms: beim Hineinbewegen des Magneten ein negativer Spannungsimpuls, beim herausbewegen ein positiver.Lösung: man nimmt zwei Spulen! In diesem Fall ist die Reihenfolge, in der sich der Magnet durch die Spulen bewegt, abhängig von der Bewegungsrichtung der POV-Stage. Wenn man nun an beiden Spulen die Spannung abgreift, kann man daraus die Bewegungsrichtung ableiten.
Im folgenden Bild ist die Schaltung dargestellt, mit der das realisiert werden kann. Die beiden Spulen L1 und L2 sind die "Sensorspulen" durch die der Magnet läuft. Die hier induzierte Spannung wird über die Dioden D1 bis D8 gleichgerichtet und speist den Kondensator C1, der die Stromversorgung der Schaltung übernimmt. Jeweils eines der beiden Spulenenden ist mit einem Eingang des ATtiny 2313 verbunden, so dass dieser über Pinchange (PC)-Interrupts (IRQ) erkennen kann, in welcher Reihenfolge die beiden Spulen durchlaufen wurden (diese Eingänge nenne ich im Folgenden Sensoreingänge). Die Widerstände R1 und R2 halten die Sensoreingänge auf einem definierten Pegel.

Schaltplan POV-Stage
An den Tiny sind dann noch die LEDs für die POV angeschlossen, wobei hier helle LEDs genutzt werden, der Strom durch sie aber mit relativ großen Widerständen (RN1 und RN2) auf unter 1mA begrenzt wird - so reicht der geringe induzierte Strom aus, um die Schaltung zu versorgen. Die Stage nutzt 2x 7 LEDs, so dass zwei Zeilen gleichzeitig dargestellt werden können.
Einen unschönen Punkt an dieser Schaltung muss ich aber auch noch erwähnen: über die Dioden D1 bis D8 fallen ungefähr 0,7V ab. Dadurch ist kurzzeitig (während eines Impulses) die Spannung an den Sensoreingängen 0,7V höher als die Versorgungsspannung bzw. 0,7V niedriger als GND. Beides ist dem Tiny nicht wirklich zuträglich, der hier eigentlich nur -0,5V ... Vcc+0,5V sehen möchte. Bisher ist er mir aber noch nicht abgeraucht


Prototyp
Obiges Bild zeigt den Aufbau des Prototypen auf einer Lochrasterplatine. Abgesehen vom unordentlichen Löten (ursprünglich hatte ich die Schaltung etwas anders aufgebaut und dann alles umändern müssen - daher die Lötzinnreste) ist vielleicht der Sensor noch eine Erwähnung wert: das Röhrchen ist ein Stück Installationsrohr aus dem Baumarkt, auf welches ich zwei Spulen á 1000 Windungen aufgebracht habe. Das Ganze dann noch mit Heißkleber fixiert und auf beiden Seiten mit einem Korkstopfen verschlossen und fertig ist der Bewegungssensor.
Soweit zur Hardware, im nächsten Posting kommt das Programm ...
Viele Grüße,
Thomas(_st)
 Beide Spulen haben 1000 Windungen.
Beide Spulen haben 1000 Windungen.